Basic Rover - Stuff We Made (Axis)
In this project, we used the MotorGo Axis to make a self-balancing, room-mapping rover. With Lidar integration and an IMU, as well as power-dense BLDC motors with high quality controls, we were able to squeeze a ton of cool behavior out of a basic mechanical design.

How does this work?
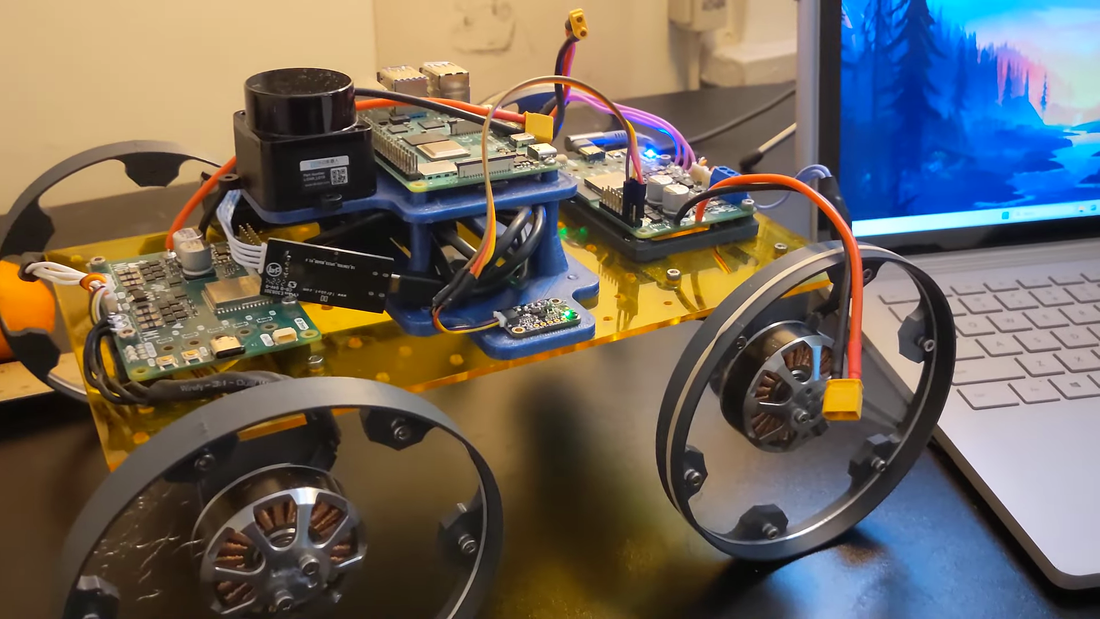
This rover has 4 motors, one on each wheel. We used 2 MotorGo Axis prototypes to drive all 4 motors. The rover has rubber bands on the back wheels and hard plastic wheels on the front so it can skid steer easily. The rover also has an IMU, lidar, Raspberry Pi, and a lipo battery for more roaming distance.

To balance, we use a very similar algorithm to the one we used on the dedicated self-balancing robot. Find the balance point, tune the controller, and start balancing with the MotorGo PID tuning app.
This is a super rudimentary rover so we have not made any files available for download. We do want to make a mid-sized rover with more polish in the future though because it's such a useful learning platform.
What did we learn?
This project laid foundations for later projects. For example, we used what we learned on this rover to build an Urban Search and Rescue (USAR) demo for the MotorGo Plink. Many features of this project - remote control, localization and mapping, and odometry - built on what we learned from making this simple rover.
This was also a great chance to test some of our beefier MotorGo Axis prototypes. The first Axis used a smaller motor driver, and these prototypes were supposed to be 10x more powerful. We were curious how it would work, and this robot helped validate that the Axis was both stable and more powerful than its mini predecessor.
Conclusions
This was a fun project that equipped us for more complicated robot builds later on. If you want to build your core robotics skills, whether mechanical, programming, machine learning, etc., a 4-wheel rover is an amazing place to start.